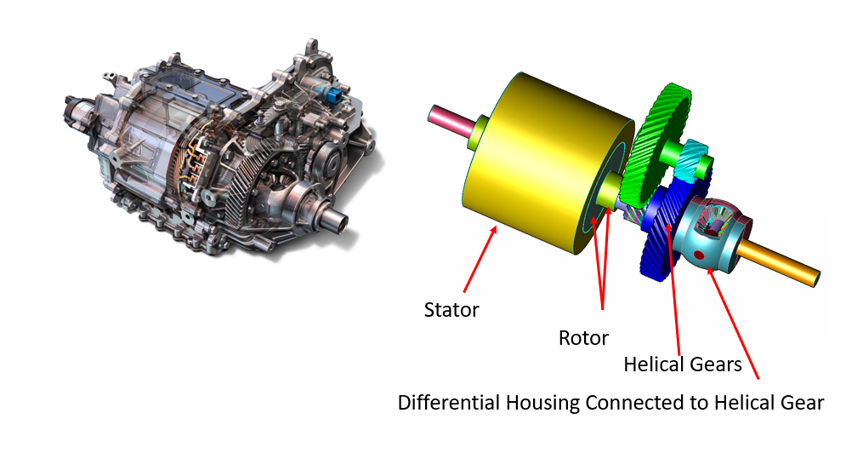
The performance of an Electric Vehicle Power Unit is directly connected with critical tolerances. Tolerances drive opportunities for performance enhancement with cost reduction. The tests normally used to determine and validate tolerances are both expensive and time consuming with prototype parts. By replacing the initial tests with Digital Twin simulations, results can be obtained quickly, and at a much lower cost. This article discusses one of these tests and the results.
A reader asks: We are currently revising our gear standards and tolerances and a few questions with the new standard AGMA 2002-C16 have risen. Firstly,
the way to calculate the tooth thickness tolerance seems to need a "manufacturing profile shift coefficient" that isn't specified in the standard; neither is another standard referred to for this coefficient. This tolerance on tooth thickness is needed later to calculate the span width as well as the pin diameter. Furthermore, there seems to be no tolerancing on the major and minor diameters of a gear.
What is the relationship between angular backlash and mean or normal backlash, the axial movement of wheel gear, and mean or normal backlash for bevel and hypoid gears?